Vessel.flight
在kRPC中,flight 方法用于获取与飞行器的飞行相关的数据。这些数据通常包括飞行器的速度、加速度、高度、姿态等信息。flight 方法需要一个参考系作为参数,以便返回相对于该参考系的飞行数据。
功能和使用
获取飞行数据:
flight方法返回一个Flight对象,该对象包含飞行器的各种飞行数据。设置参考系:
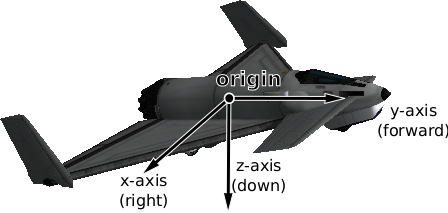
flight方法需要一个参考系作为参数。你可以使用飞行器的参考系、地面参考系或其他自定义参考系。
import krpc
# 连接到kRPC服务器
conn = krpc.connect(name='Flight Example')
space_center = conn.space_center
# 获取当前活动飞行器
vessel = space_center.active_vessel
# 获取相对于飞行器自身参考系的飞行数据
flight_data = vessel.flight(vessel.reference_frame)
# 打印飞行数据
print(f"Mean altitude: {flight_data.mean_altitude} meters")
print(f"Surface speed: {flight_data.surface_speed} m/s")
print(f"Vertical speed: {flight_data.vertical_speed} m/s")
print(f"Pitch: {flight_data.pitch} degrees")
print(f"Heading: {flight_data.heading} degrees")示例解释
连接到kRPC服务器:使用
krpc.connect()函数连接到 kRPC 服务器。获取当前活动飞行器:通过
space_center.active_vessel获取当前活动飞行器。获取飞行数据:通过
vessel.flight(vessel.reference_frame)获取相对于飞行器自身参考系的飞行数据。打印飞行数据:从
flight_data对象中获取并打印飞行器的平均高度、表面速度、垂直速度、俯仰角和航向角。
飞行数据属性
以下是 Flight 对象的一些常见属性:
mean_altitude:飞行器的平均海拔高度。
surface_altitude:飞行器的表面海拔高度。
bedrock_altitude:飞行器的基岩海拔高度。
surface_speed:飞行器相对于地面的速度。
vertical_speed:飞行器的垂直速度。
horizontal_speed:飞行器的水平速度。
pitch:飞行器的俯仰角。
heading:飞行器的航向角。
roll:飞行器的滚转角。
g_force:飞行器所受的重力加速度。
throttle:飞行器的节流阀位置。
应用场景
任务监控:实时监控飞行器的飞行数据,以确保任务的安全和顺利进行。
自动化操作:在自动化脚本中,根据飞行数据进行条件判断和控制操作。
科学实验:记录和分析飞行数据,以获取科学实验的结果。