Vessel.surface_velocity_reference_frame
在kRPC中,surface_velocity_reference_frame 属性用于获取飞行器的表面速度参考系对象。表面速度参考系是一个相对于飞行器所在天体的表面运动的坐标系,通常用于测量飞行器相对于地表的速度。这种参考系在进行低空飞行或着陆操作时非常有用。
功能和使用
获取飞行器的表面速度参考系:
surface_velocity_reference_frame属性返回一个ReferenceFrame对象,表示当前飞行器的表面速度参考系。
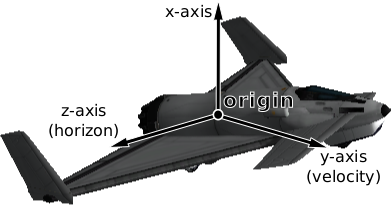
Vessel surface velocity reference frame origin and axes
import krpc
# 连接到kRPC服务器
conn = krpc.connect(name='Surface Velocity Reference Frame Example')
space_center = conn.space_center
# 获取当前活动飞行器
vessel = space_center.active_vessel
# 获取飞行器的表面速度参考系
surface_velocity_reference_frame = vessel.surface_velocity_reference_frame
print(f"Surface Velocity Reference Frame: {surface_velocity_reference_frame}")
# 获取飞行器在表面速度参考系中的速度
vessel_velocity = vessel.velocity(surface_velocity_reference_frame)
print(f"Vessel Velocity (X, Y, Z): {vessel_velocity}")示例解释
连接到kRPC服务器:使用
krpc.connect()函数连接到 kRPC 服务器。获取当前活动飞行器:通过
space_center.active_vessel获取当前活动飞行器。获取飞行器的表面速度参考系:通过
vessel.surface_velocity_reference_frame属性获取飞行器的表面速度参考系,并打印结果。获取飞行器在表面速度参考系中的速度:通过
vessel.velocity(surface_velocity_reference_frame)获取飞行器在表面速度参考系中的速度,并打印结果。
应用场景
着陆和起飞操作:在飞行器着陆和起飞过程中,使用表面速度参考系进行精确的速度控制和位置测量。
低空飞行:在低空飞行时,使用表面速度参考系来确保飞行器的安全和稳定。
科学实验:在科学实验中,使用表面速度参考系进行速度的精确测量和数据记录。
常见参考系
飞行器参考系:
vessel.reference_frame,表示飞行器自身的参考系。轨道参考系:
vessel.orbital_reference_frame,表示飞行器的轨道参考系。表面参考系:
vessel.surface_reference_frame,表示飞行器的表面参考系。天体参考系:例如
body.reference_frame,表示特定天体(如行星或卫星)的参考系。
