CelestialBody.reference_frame
在kRPC中,CelestialBody 类的 reference_frame 属性用于获取与天体相关的参考系对象。这个参考系通常用于表示天体自身的旋转和位置,是许多其他操作和计算的基础。
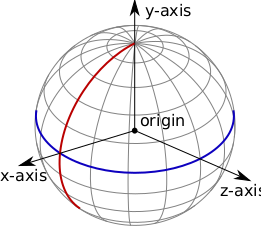
Celestial body reference frame origin and axes. The equator is shown in blue, and the prime meridian in red.
功能和使用
获取天体的参考系:
reference_frame属性是只读的,直接返回与天体相关的ReferenceFrame对象。
import krpc
# 连接到kRPC服务器
conn = krpc.connect(name='Reference Frame Example')
space_center = conn.space_center
# 获取Kerbin天体对象
kerbin = space_center.bodies['Kerbin']
# 获取Kerbin的参考系
kerbin_reference_frame = kerbin.reference_frame
print(f"Kerbin Reference Frame: {kerbin_reference_frame}")
# 获取Kerbin在其参考系中的位置
kerbin_position = kerbin.position(kerbin_reference_frame)
print(f"Kerbin Position in its own reference frame: {kerbin_position}")示例解释
连接到kRPC服务器:使用
krpc.connect()函数连接到 kRPC 服务器。获取Kerbin天体对象:通过
space_center.bodies['Kerbin']获取Kerbin天体对象。获取Kerbin的参考系:通过
kerbin.reference_frame属性获取Kerbin的参考系,并打印结果。获取Kerbin在其参考系中的位置:通过调用
kerbin.position(kerbin_reference_frame)方法,获取Kerbin在其参考系中的位置,并打印结果。
应用场景
轨道力学分析:在轨道力学分析中,使用天体的参考系进行精确的计算和仿真。
任务规划:在任务规划阶段,利用参考系设计和优化轨道插入和转移操作。
科学研究:在科学研究中,使用参考系数据进行天体物理学和天文学的研究。
相关属性和方法
non_rotating_reference_frame:获取天体的非旋转参考系。position:获取天体在指定参考系中的位置。velocity:获取天体在指定参考系中的速度。rotation:获取天体在指定参考系中的旋转。direction:获取天体在指定参考系中的方向。angular_velocity:获取天体在指定参考系中的角速度。
